Un robot-vélo qui maîtrise le vélo, cela surprend. Mais quand il commence à sauter et à faire des cabrés, la surprise est totale.
Une révolution mécanique inspirée du cycliste humain
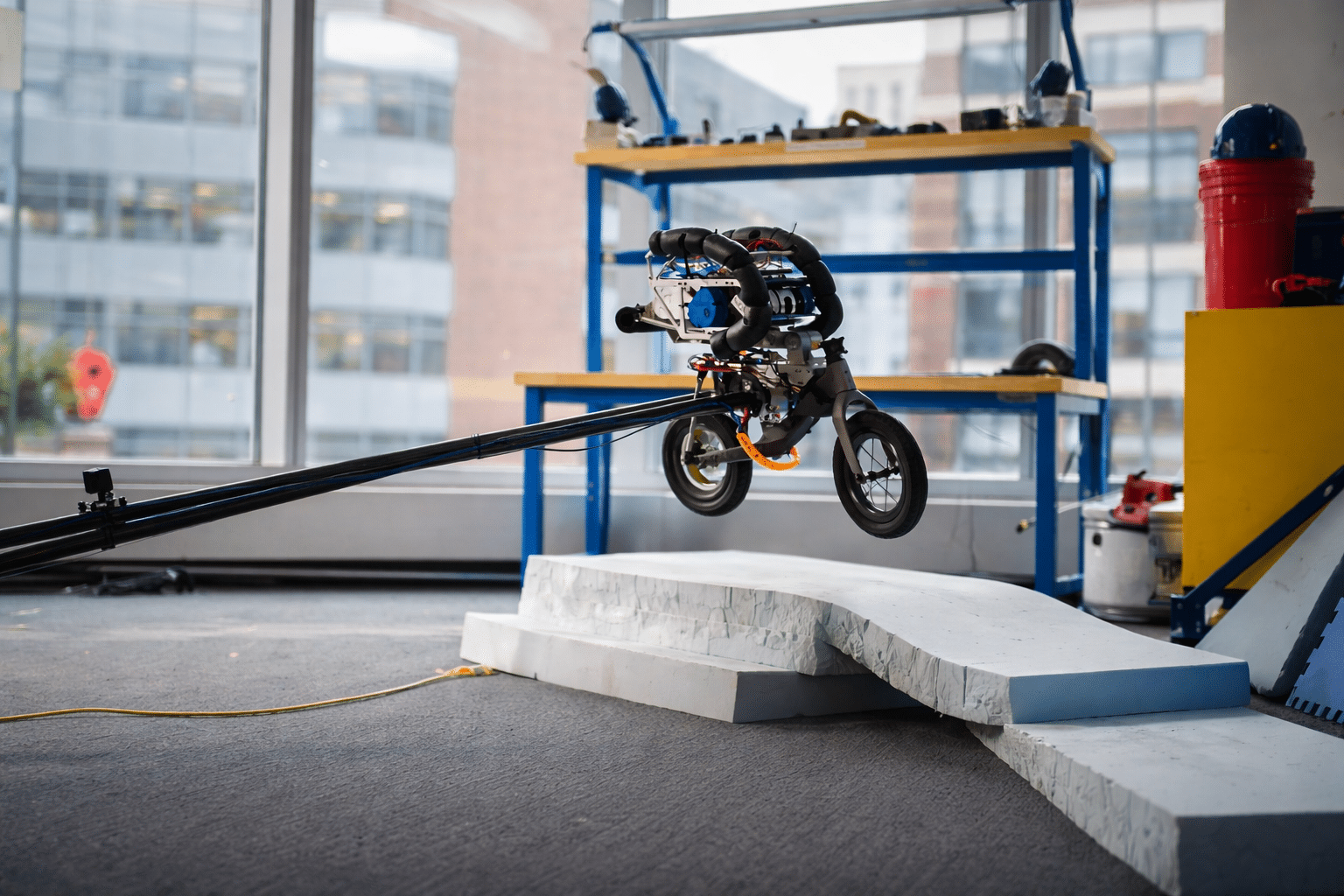
Longtemps, l’idée de voir un vélo robotique semblait sortie d’un film de science-fiction. Pourtant, des chercheurs américains du Robotics and AI Institute (RAI), viennent de franchir ce cap en donnant vie à une machine agile et dynamique sur deux roues. Ce robot-vélo ne se contente pas de rouler : il bondit et exécute des acrobaties dignes d’un sportif confirmé.
L’exploit repose sur un subtil équilibre entre simplicité mécanique et intelligence logicielle avancée. Plutôt que de multiplier les composants, les ingénieurs ont misé sur une structure optimisée où chaque élément a son utilité précise. Un vrai tour de force technique pour ce robot auto-équilibré !
Comment le robot-vélo apprend-il ses figures impressionnantes ?
La grande originalité du projet réside dans l’apprentissage numérique. Le robot-vélo a suivi un entraînement intensif, mais pas dans une salle dédiée ou sur circuit. Tout s’est passé virtuellement, grâce à une simulation poussée.
Dans cet espace numérique, l’Ultra Mobility Vehicle (UMV) a pu tester des milliers de combinaisons sans subir les conséquences des erreurs mécaniques. Résultat : il maîtrise aujourd’hui l’art de rester stable, même lors de mouvements brusques ou déséquilibrés sur différents terrains accidentés.
Les atouts de la simulation pour la robotique
Utiliser une simulation présente de sérieux avantages pour concevoir des robots sportifs. Cela permet d’anticiper les réactions physiques, de valider les stratégies rapidement et d’éviter bien des dégâts sur le matériel. La flexibilité logistique reste aussi un point fort non négligeable.
Grâce à cette méthode, le robot-vélo évolue dans un environnement contrôlé propice à l’innovation. Son comportement progresse itérativement au fil des essais virtuels et ajustements, affinant ainsi ses compétences d’auto-équilibrage.
Des compétences qui défient la gravité
Le plus impressionnant reste sans doute la capacité de ce vélo robotique à effectuer des sauts d’un mètre de haut et atteindre 8 mètres par seconde en vitesse de pointe. Il rivalise ainsi avec certains modèles beaucoup plus complexes et onéreux.
Ces acrobaties mettent en lumière l’efficacité du contrôle embarqué. En quelques secondes, le robot-vélo adapte sa posture, anticipe la réception et optimise l’équilibre, autant de réflexes habituellement réservés aux humains experts.
Vers une nouvelle génération de robots tout-terrain ?
Avec ces prouesses, on peut imaginer de nombreux usages futurs pour ce robot-vélo. Imaginez-le évoluer dans des environnements difficiles, livrer des marchandises en zone urbaine ou encore explorer des chantiers dangereux. Les perspectives d’autonomie et de mobilité efficace ne manquent pas !
Ce banc d’essai mobile repousse les frontières du possible. Il ouvre la voie à une multitude d’applications concrètes, là où la mobilité et l’autonomie sont cruciales pour affronter des obstacles divers.
Comparaison entre robot-vélo et autres robots mobiles
Différents types de robots mobiles ont marqué l’histoire de la robotique. Beaucoup intègrent des technologies coûteuses, réalisées autour de jambes articulées ou de chenilles sophistiquées. Pourtant, ils peinent parfois sur certains terrains exigeants.
Le robot-vélo fait figure d’exception. Il conjugue légèreté et souplesse, ce qui lui confère une adaptabilité précieuse. Voyons comment il se positionne parmi les autres solutions innovantes du secteur de la robotique autonome.
| Type de robot | Capacité de saut | Vitesse max | Simplicité mécanique |
|---|---|---|---|
| Robot-vélo | 1 mètre | 8 m/s | Élevée |
| Robot quadrupède | 0,4 mètre | 5 m/s | Moyenne |
| Robot à chenilles | Incapacité | 3 m/s | Basse |
Quels défis restent à relever pour les robots-cyclistes ?
Maîtriser l’équilibre n’a pas suffi ! Les ingénieurs visent désormais à améliorer la robustesse face aux aléas extérieurs, comme les pentes raides, le vent ou les obstacles variés rencontrés en ville ou à la campagne.
Un autre enjeu concerne l’interaction avec les êtres humains et leur environnement immédiat. Un robot-vélo autonome doit apprendre à anticiper la trajectoire des piétons, reconnaître et éviter les dangers, et s’adapter en temps réel à l’imprévu.
Le futur de la mobilité intelligente s’annonce passionnant
Voir un robot-vélo tenir sur deux roues puis réussir des figures qu’on croyait réservées aux as du BMX, c’est fascinant. Cette innovation montre combien l’alliance entre logique informatique et création mécanique est prometteuse.
- Optimisation de la consommation d’énergie
- Ajout de capteurs pour collecter des données utiles
- Développement d’algorithmes pour des déplacements plus sûrs
- Applications dans les secours, la livraison ou l’assistance médicale
Le champ des possibles continue de s’élargir avec des machines capables de passer partout et de se montrer inventives face à l’inattendu. Impossible de prédire avec certitude ce que réservent les prochaines innovations, mais une chose est sûre : l’aventure robotique sur deux roues ne fait que commencer.